Yasmine Marani: How can drones develop sea-legs in a moving environment?
KAUST Library
Overview
How can drones develop sea-legs in a moving environment?
Abstract
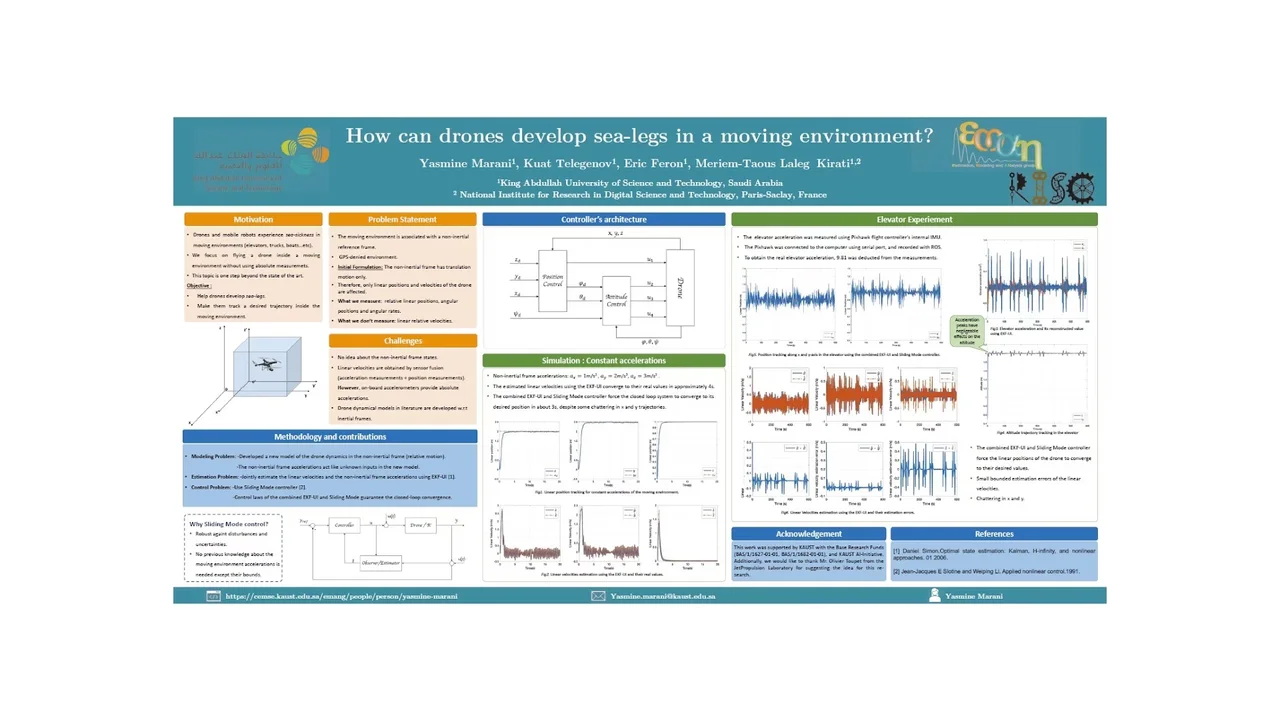
As surprising as it seems, drones and mobile robots in general experience sea-sickness when put in a moving environment. Several examples of robotic sea-sickness go from the simple case of operating a robot on a moving platform, such as a truck to operating a robot inside an airplane, or even a spacecraft. For the specific case of drones, two famous examples come to mind: flying a drone inside an elevator, and flying a drone inside a boat for surveillance purposes. The fate of drones experiencing sea-sickness is still uncertain because there has been, to the best of the authors' knowledge, no research at all on the topic. As soon as the moving environment accelerates, takes turns, or rotates upon itself, ceases to be an inertial reference frame. The resulting navigation problem is of a very novel nature that is one step beyond the state of the art. In this work, we propose a formulation of the problem in the simplest possible way as a starting point. The objective of simplifying the problem is to avoid using sophisticated control and measurement devices, such as cameras, and rely instead on the control system strategies. In the first stage of this project, we consider that the moving environment, to which is associated a non-inertial frame, has only translation motions with respect to the inertial frame. The goal is to make the drone track a desired trajectory inside the moving environment without having access to measurements in the inertial frame. The major challenge in this project is that the drone models available in the literature were all developed with respect to the inertial reference frame. Therefore, we developed an adequate model for the drone motion inside the moving environment using the relative motion principles. The acceleration of the moving environment acts like an unknown input in the newly developed model. To implement a controller, we need information about all the states of the system. To recover the immeasurable states, we use an extended Kalman Filter with Unknown Inputs to estimate simultaneously the states of the drone as well as the non-inertial frame accelerations. Using the estimated states, we implement a combined EKF-IU and Sliding Mode controller which offers good robustness properties and great capabilities to deal with system uncertainties and disturbances. Two numerical simulations were conducted to illustrate the performance of the observer-based control approach: the first one represents an ideal case where the non-inertial frame's accelerations are constant. The second one illustrates flying a drone in an elevator using experimentally collected acceleration measurements. The obtained results were very encouraging.
Brief Biography
Yasmine is a Ph.D. candidate at Estimation Modeling and Analysis Group (EMANG) under the supervision of Professor Taous-Meriem Laleg-Kirati at King Abdullah University of Science and Technology (KAUST), Saudi Arabia. Prior to joining KAUST as a Ph.d. student, she was an intern in the EMANG research group where she worked on the fouling estimation and localization in the Direct Contact Membrane Distillation (DCMD) process. She obtained her Master’s degree from National Polytechnic School of Algiers on Control System Engineering. She is working in collaboration with Prof. Feron and his Ph.D. student Kuat Telegenov on "Learning and adapting to sensor dissonance in Robotics" project included in the AI initiative.